新型气动人工肌肉问世,让机器人可举起自重100倍物体

(来源:IT之家)
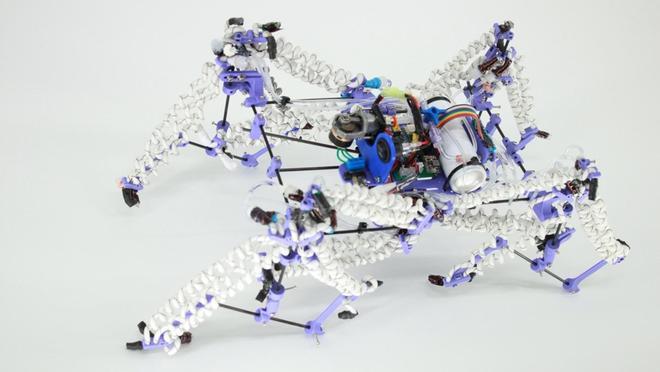
IT之家 4 月 4 日消息,科技媒体 interestingengineering 今天(4 月 4 日)发布博文,报道称美国亚利桑那州立大学团队研发出新型气动人工肌肉,突破了传统电机驱动的性能瓶颈,让机器人能举起自重 100 倍的物体。
图源:美国亚利桑那州立大学
该项目由博士生埃里克 · 韦斯曼(Eric Weissman)领导,致力于突破现有电机驱动系统的局限,相关成果已发表于《美国国家科学院院刊》。
核心技术在于模仿了自然肌肉的收缩与膨胀机制,采用 HARP(螺旋各向异性增强聚合物)致动器。韦斯曼形容这种装置形似空心螺旋状意面,仅需少量空气即可驱动伸缩。
相较于刚性电机,该肌肉具有柔性、轻量化及近乎静音运行的优势。这种设计显著降低了气压需求,无需外接电源就能让机器人独立行走。
在环境适应方面,该装置可耐受极端高温,能在沸水及磨蚀性环境中稳定运行,其柔性特质允许机器人穿越废墟或狭窄空间,适用于灾难救援场景。在倒塌建筑搜救任务中,机器人可灵活挤入受限空间搜寻幸存者,且不会对周围环境造成二次破坏。
研究团队展示了多项实际应用成果。他们开发了一款仿象鼻的仿生机械臂,能轻松跨越障碍物,适用于精细工业任务及人机交互。
此外,团队还研制了可穿戴背部支撑设备,结合软体材料与可调节助力功能,保持了佩戴的轻便与舒适同时,有效减轻了重物搬运时的身体负担。

目录






