千觉机器人:让触觉成为与视觉并列的“认知模态”


2026年,带触觉的数据飞轮将成为具身智能的下一个关键战场。
在工厂里,机器人能扫描零件轮廓、定位装配孔位;在实验室里,它能读取实验数据、识别仪器状态;在商场里,它能识别人脸、引导顾客路线。视觉让机器人"看"得很清楚,但当它伸手去夹起一块软布、拿起一张薄纸、握住一颗鸡蛋的时候,它还需要知道用了多大的力度、是否抓稳、是否发生滑移、以及下一步应该如何调整。这些能力,正是触觉感知要解决的问题。
“机器人真正进入现实世界,不能只有视觉。视觉让机器人‘看见’世界,而触觉让机器人有机会真正‘操作’世界。”千觉机器人创始人马道林向钛媒体创投家表示。
2024年起,主流灵巧手公司开始尝试搭载传统触觉传感器;到了2025年下半年至2026年年初,技术风向逐步向视触觉(Vision-Based Tactile)收敛。视触觉的输出是图像,机器人的视觉和大模型输入的主体也是图像,这意味着,算法端可以直接复用过去几年大模型时代积累的视觉编码器、多模态方法以及Token化技术,进而降低边际成本。
触觉成为具身智能从看见世界走向理解物理世界的关键一环。Ego(第一人称视角)、UMI(通用操作接口)、真机数据这三条数据管线谁先跑通,谁就握住了下一代具身基础模型的入场券。
从“盲操作”到“摸得准”
在全球机器人领域旗舰会议ICRA 2026大会上,千觉机器人展出了一台双臂机器人,在没有预设轨迹的情况下,自主完成纸盒成型的全过程。
纸板是典型的弱柔性物料,轻薄、易变形,每一次抓取和折边的接触状态都随操作动态变化。传统工业机器人依赖固定轨迹编程和纯视觉引导,在面对此类物料时极易因形变误差导致操作失败;传统的力控方案又难以捕捉微观的动态滑移。
传统VLA模型主要依赖视觉+语言指令驱动动作,只有“看”和“做”,这种架构在结构化环境中表现尚可,一旦遇到弱柔性物料、微小形变、动态滑移等场景,就会因为缺乏实时物理反馈而陷入“盲操作”。
千觉机器人的解决方案是自研VTLA(Vision-Tactile-Language-Action)模型,这套模型的核心创新在于,将触觉从传统控制系统中的反馈信号提升为与视觉同等级的认知模态。视觉负责理解环境与物体状态,触觉负责理解接触过程与物理交互状态,两者共同构成机器人对物理世界的完整感知基础。
VTLA模型并非简单地增加一种新的传感器输入,而是让机器人同时具备“看见世界”和“感知接触世界”的能力。视觉回答“物体在哪里”,触觉回答“接触发生了什么”,两者共同驱动机器人在复杂接触场景中的决策与操作。
叠纸盒演示中,面对轻薄易变形的纸板,搭载VTLA模型的机器人不但通过实时感知“纸板的受力状态”,连续完成抓取、展开、折边和压实等操作,顺利完成纸盒成型的任务。还保持了持续外部干扰下的稳定执行,充分体现了其在干扰条件下的鲁棒性与泛化能力。
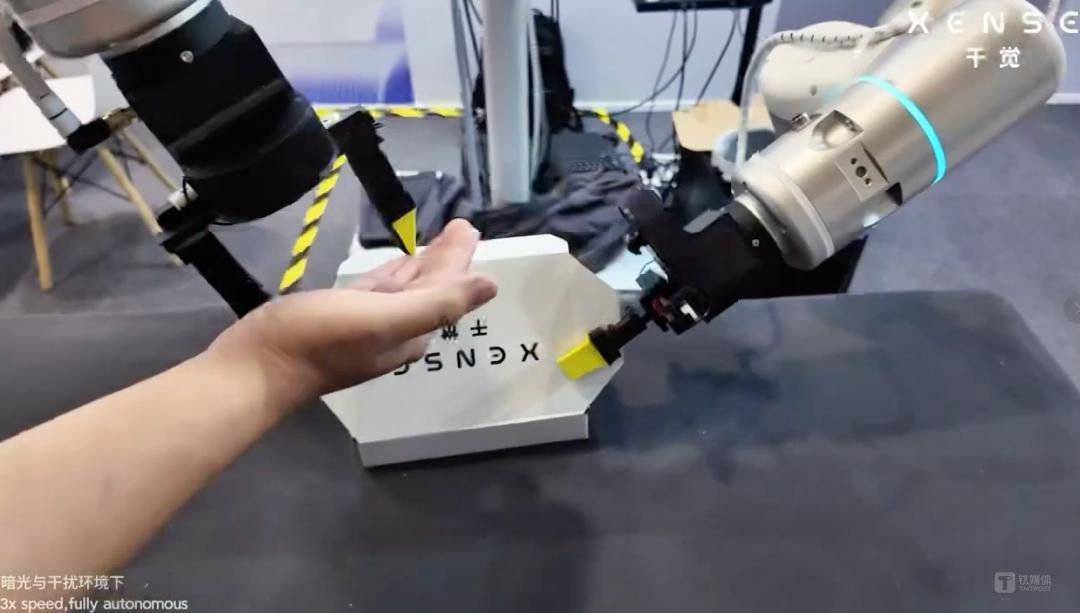
干扰情况下,VTLA模型驱动双臂机器人长序列纸盒成型仍能自主完成作业。
“触觉不是机器人能力上的‘锦上添花’,而是机器人从实验室演示走向产业应用的重要底层能力。尤其在人形机器人、精密制造、智能检测等场景中,真正决定落地效果的,往往不是机器人‘能不能动’,而是在复杂物理接触中能不能稳定、可靠、可复制地完成任务。”马道林表示。
VTLA模型解决了“怎么用触觉”的问题,但高质量、多模态的触觉数据从哪里来,这正是TacCap-Gripper存在的技术逻辑。

TacCap-Gripper触觉数采设备
这是一款专为机器人物理交互数据采集打造的硬件,集成了高精度视触觉传感器、IMU惯性测量单元与高分辨率编码器,能够实现动作、视觉、触觉多维度数据的同步采集与精准匹配。
人类演示者戴上它完成一次抓取,产出的不仅是一段视频,而是一组包含手指姿态、接触力分布、物体形变过程的完整数据包,直接转化为VTLA模型训练的标准化“养料”。
然而,在工程落地层面,视触觉路线有着极高的硬性门槛。传统视触觉传感器往往面临体积臃肿、高频动态响应不足、硅胶涂层易磨损以及量产一致性差等痛点。每一项都是横亘在实验室与市场之间的分水岭。
针对上述痛点,千觉机器人通过自研工艺,使其指尖触觉传感器在保持高精度微观形变、纹理变化捕捉能力的同时,实现了大幅度的小型化与结构优化,可精准支撑对位、拨动、滚动、精细抓取等高精度操作。
千觉机器人多模态触觉传感器产品矩阵
MIT博士后带队
作为一家硬科技企业,千觉机器人有着鲜明的学术与产业双栖基因。
马道林于2024年5月创立了千觉机器人,他毕业于北京大学,在北大取得博士学位后进入了MIT Mcube 实验室从事博士后研究,师从国际机器人操作与触觉感知领域的领军学者Alberto Rodriguez(现任波士顿动力Robot Behavior负责人,MIT前副教授),目前在上海交通大学任副教授、博士生导师。凭借在触觉感知与具身智能领域的长期深耕,他斩获了国际机器人学界公认的最高学术荣誉—ICRA 2021全球唯一最佳论文奖。
千觉机器人创始人:北京大学力学博士与MIT博士后、上海交通大学副教授马道林
其团队汇聚了来自MIT、北京大学、清华大学、上海交通大学、复旦大学、UCL、悉尼大学等国内外顶尖院校的跨学科人才,千觉在机器人操作与触觉感知领域持续攻坚,打通了从底层传感器设计、高价值数据采集,到感知算法迭代与触觉模型研发的全链条技术闭环。这种从“底层感知”到“机器人操作控制”的完整技术积累,构成了千觉难以复制的核心壁垒。
在视触觉领域,全球顶尖人才主要来自于MIT,而马道林则是其中为数不多的回国创业者。这种系统性的技术判断力和工程攻坚能力,迅速吸引了资本市场的关注。
成立仅一年半,千觉机器人就完成了天使轮、Pre-A轮融资,累计融资数亿元人民币,投资方包括高瓴创投、理想汽车、元禾原点、孚腾资本(上海具身智能产业基金)、智元等知名投资机构和产业方。
“接下来一两年,纯单品的硬件公司将面临巨大压力,产业竞争正迅速从碎片化的算法研究、单点传感器的内卷,升级为‘传感器+全栈模型+场景数据’的系统级对决。”马道林表示:“千觉机器人围绕触觉硬件、数据采集、模型训练和产业应用,构建机器人理解真实物理世界的底层能力。”
在目前的具身智能产业链中,通用大模型与整机结构的生态主导权往往掌握在主机厂或Ai巨头手中。对于千觉这类技术型初创企业而言,将战略重心锚定在底层的触觉能力上,推动硬件标准化、数采规范化以及跨模态对齐,是在巨头环伺的生态中切入细分市场的一种务实选择。
从“看见世界”到“操作世界”,机器人还需要补上触觉这一课。
回看人工智能的发展历程,计算机视觉的爆发建立在海量标准化开源数据集与软硬件高度对齐的基础之上;而当前的触觉领域,无论在高质量数据规模、物理接口标准还是大规模预训练模型的适配上,都仍处于相对早期的探索阶段。
触觉感知何时能从技术亮点变为行业标配,这取决于三个关键变量:
第一,成本门槛。触觉传感器虽在灵巧手整体 BOM 成本中占比不占大头,但其高昂的软硬件一体维护、校准与一体化集成成本,对追求大规模量产经济性的主机厂而言,仍是一道现实的门槛。
第二,数据规模。尽管行业已有部分百万帧级别的局部开源图像,但真正具备多物体、多形态、跨场景且带物理真值标签的操作轨迹数据集依然极度匮乏。触觉数据飞轮能否真正转起来,直接决定了其控制模型的泛化能力。
第三,市场验证。主机厂是否愿意为“摸得准”支付溢价,毕竟,在人形机器人尚未真正走进家庭之前,触觉的 ROI 仍需市场验证。机器人想要真正做到“摸得准、做得稳”,不仅取决于千觉等技术提供商在硬件和软硬件融合上的迭代速度,更取决于整个具身智能产业链对触觉价值的实际买单意愿。
行业的真正质变,往往就发生在那些传统视觉遭遇盲区、力控陷入迟钝的物理缝隙里。当机器人不仅能够用视觉去旁观世界,更能够用触觉去试探世界时,具身智能才算真正拿到了通往物理现实的解密钥匙。
(本文首发钛媒体App,文 | 智客Zhiker,作者|郭虹妘 )
更多精彩内容,关注钛媒体微信号(ID:taimeiti),或者下载钛媒体App







