人形机器人五大核心新技术解析

人形机器人已成为全球科技竞争的新 “制高点”。在人工智能技术落地之后,美国将机器人产业推向战略高度:据 Politico 报道,特朗普政府计划于 2025 年发布机器人技术专项行政命令,商务部长卢特尼克近期密集会晤行业 CEO,背后核心逻辑直指制造业回流。全球范围内,美国企业形成 “模型 - 仿真 - 硬件” 闭环布局,资本与技术高度集中;国内则凭借完善的供应链体系,加速场景落地与全栈式技术突破,人形机器人正成为中美科技竞争的下一个核心赛道。
本文将聚焦传感器手套、新型电机、氮化镓驱动、新型减速器及轻量化五大核心新技术,结合国内外产业进展展开深度解析。
01 传感器手套 & 电子皮肤:重构机器触觉感知
2025 年 12 月 3 日,特斯拉 Optimus v2.5 在 NeurIPS 2025 大会亮相,其搭载的传感器手套成为行业焦点。传统灵巧手传感器易被工况划伤,整手更换成本高昂,催生了传感器手套这一增量市场。北美人形机器人公司 Proception 创始人 Jay 指出,为机器人配备仿生手套 / 皮肤将成为行业新常态。
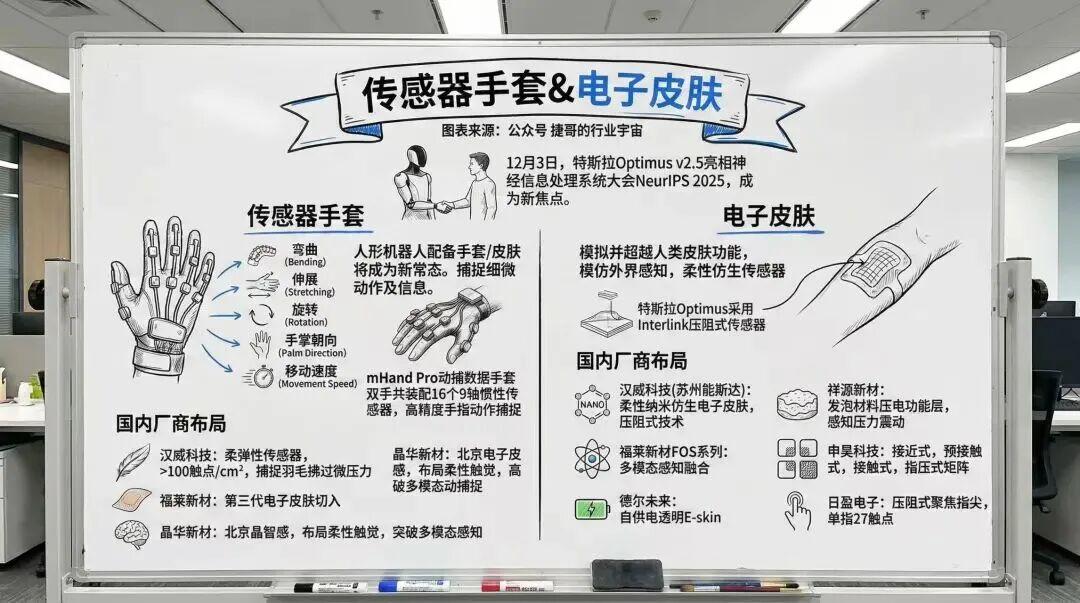
资料来源:公众号 捷哥的行业宇宙
传感器手套
核心功能是精准捕捉手指弯曲、伸展、旋转等细微动作,以及手掌朝向、移动速度等多维信息。例如 mHand Pro 动捕数据手套,双手共集成 16 个 9 轴惯性传感器,实现亚毫米级动作捕捉精度。国内厂商布局成果显著:
 汉威科技:柔弹性传感器高性能款每平方厘米触点超 100 个,可捕捉羽毛拂过级微压力信号,响应速度达毫秒级,兼具超薄形态与定制化优势,经 5.4 亿次压力循环测试验证可靠性;福莱新材:第三代电子皮肤产品切入传感器领域,支持精密装配与智能交互场景,实现从指尖到全身的触觉覆盖;晶华新材(子公司晶智感):突破多模态感知技术,产品涵盖 PI 膜、纺织物、自修复弹性体等多元基底,其 L20 工业版灵巧手方案实现 1 万 + 高密度触觉感知点与 “全掌协同”。
汉威科技:柔弹性传感器高性能款每平方厘米触点超 100 个,可捕捉羽毛拂过级微压力信号,响应速度达毫秒级,兼具超薄形态与定制化优势,经 5.4 亿次压力循环测试验证可靠性;福莱新材:第三代电子皮肤产品切入传感器领域,支持精密装配与智能交互场景,实现从指尖到全身的触觉覆盖;晶华新材(子公司晶智感):突破多模态感知技术,产品涵盖 PI 膜、纺织物、自修复弹性体等多元基底,其 L20 工业版灵巧手方案实现 1 万 + 高密度触觉感知点与 “全掌协同”。
电子皮肤
电子皮肤是模拟人类皮肤功能的柔性仿生传感器(柔性传感器的高端应用形态),核心通过压力 - 电阻转换、压电效应等原理实现环境感知,产业链上游涵盖导电材料、柔性基底、封装材料等,下游聚焦系统集成与应用开发。特斯拉 Optimus 采用的 Interlink 压阻式传感器,凭借成熟的压力 - 电阻转换机制,有望成为行业主流技术路径。国内适配厂商包括:
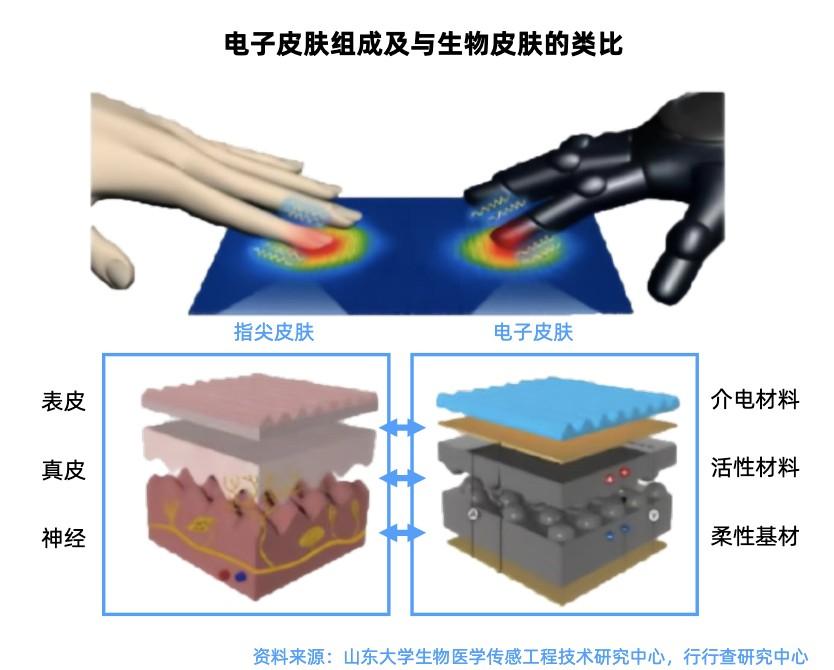 汉威科技(子公司苏州能斯达):研发柔性纳米仿生电子皮肤,核心采用压阻式技术路线;福莱新材:FOS 系列电子皮肤实现压力 + 温度 + 剪切力多模态感知融合,通过柔性印刷电子工艺集成多功能层,解决协同误差问题;德尔未来:与高校联合开发自供电透明 E-skin,突破传统传感器刚性瓶颈;祥源新材:发泡材料压电功能层通过实验室验证,压阻式传感方案具备产业化潜力;日盈电子:指尖专用压阻式产品单指集成 27 个触点(2 个温度 + 25 个压力),适配精密操作场景。
汉威科技(子公司苏州能斯达):研发柔性纳米仿生电子皮肤,核心采用压阻式技术路线;福莱新材:FOS 系列电子皮肤实现压力 + 温度 + 剪切力多模态感知融合,通过柔性印刷电子工艺集成多功能层,解决协同误差问题;德尔未来:与高校联合开发自供电透明 E-skin,突破传统传感器刚性瓶颈;祥源新材:发泡材料压电功能层通过实验室验证,压阻式传感方案具备产业化潜力;日盈电子:指尖专用压阻式产品单指集成 27 个触点(2 个温度 + 25 个压力),适配精密操作场景。
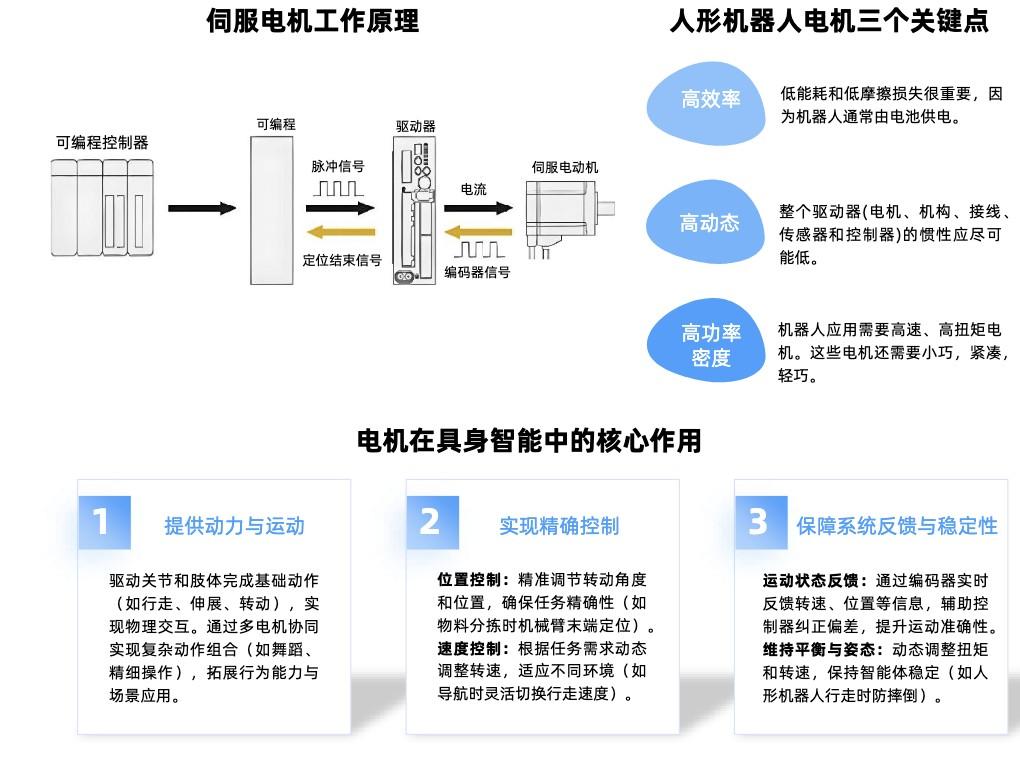
02 新型电机:力矩密度与轻量化双重突破
当前人形机器人技术路线尚未收敛,电机作为核心动力单元,力矩密度提升与轻量化成为关键攻关方向,行业涌现谐波磁场电机与轴向磁通电机两大创新路径。
谐波磁场电机
通过磁场调制效应与高磁能级材料应用,解决传统电机温升与轻量化痛点,相同体积下输出功率提升显著,功率密度突破 10kW/kg(较传统电机提升 50% 以上)。典型应用如智元远征 A2 Max 机器人,其关节峰值扭矩达 450Nm,核心得益于该电机技术的落地。国内布局厂商包括恒帅股份、德昌电机、伟创电气、兆威机电、鸣志电器、步科股份等。
轴向磁通电机
又称 “磐式电机”,采用扁平结构设计,有效磁面积集中于转子表面,具备扭矩大、重量轻的核心优势,更适配机器人下肢关节。行业实测数据显示:其重量仅为传统径向电机的 1/2,铁损降低 20%,铜绕组利用率提升至 85%,持续功率输出能力提升 45%,相同功率下轴向长度可缩短 80%,功率密度达 8-28kW/kg(为顶级径向电机的 5.6 倍),同时解决了高功率密度下的散热难题。国内进展:
量产端:宁德投资的 PGDL(聚焦商用车 / 工程机械大型产品)、东睦股份持股的小象电动(深耕机器人专用小型产品)已具备量产能力;研发端:科德数控计划 2026 年初推出人形机器人专用轴向磁通电机样机,卧龙电驱、夏厦精密、信捷电气等厂商加速技术布局。
03 氮化镓器件驱动方案:功率控制的革命性升级
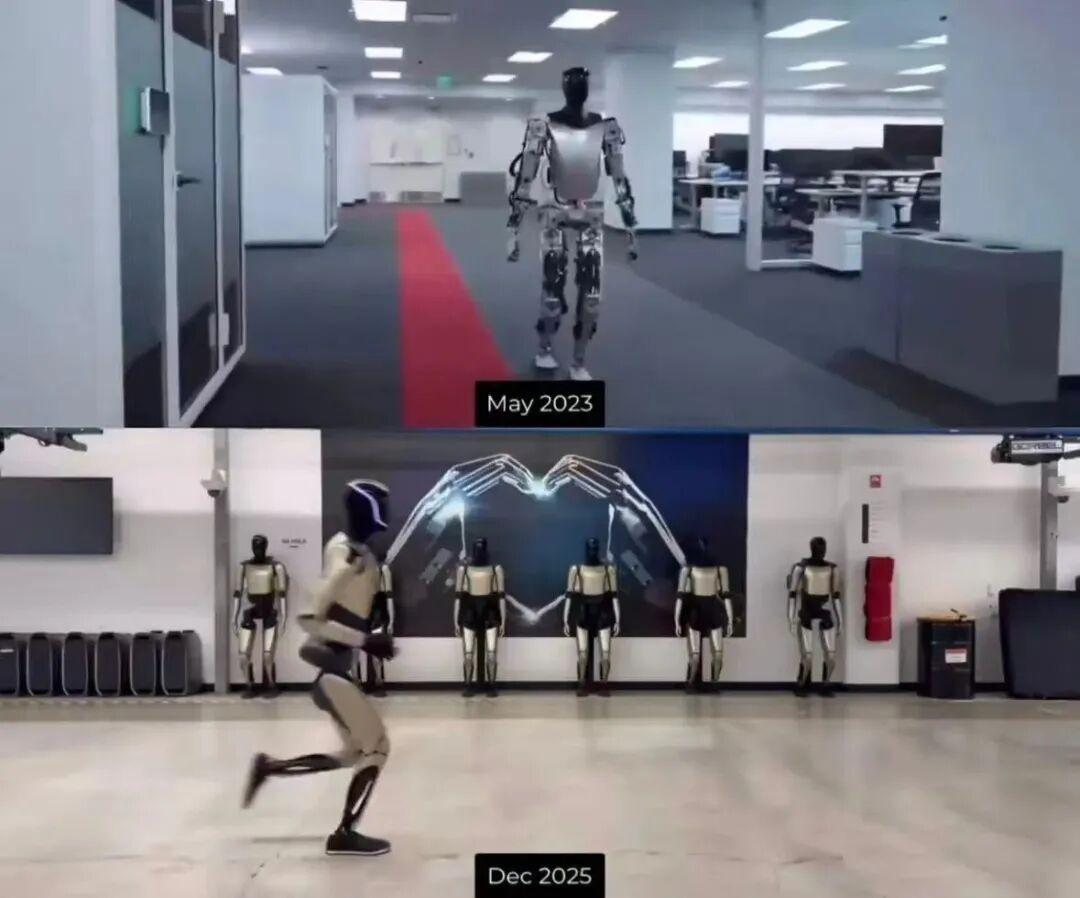
特斯拉在 2.5 代至 3 代 Optimus 迭代中,验证了新一代 GaN(氮化镓)驱动方案的可行性,直接推动机器人运动能力、步姿流畅度与灵巧手操作精度的大幅提升。
核心优势与用量测算
氮化镓器件具备高频、高效、耐高温的技术特性,虽单器件成本较高,但可通过优化整体 BOM 成本实现平衡,其电机电流响应速度较传统 IGBT 提升 3 倍以上,能耗降低 30%。用量方面:
当前水平:单台人形机器人含 30-40 个关节电机,小关节需 3-6 颗 GaN 器件,大关节最高需 24 颗,合计用量约 300 颗;未来趋势:随着自由度与功率密度提升,电机驱动、GPU 电源、BMS 等部位的氮化镓器件用量有望突破 1000 颗 / 台。
产业布局
特斯拉、Figure、智元、宇树、乐聚等国内外主流厂商已批量采用 GaN 关节电机驱动,形成明确产业趋势。国内相关厂商包括英诺赛科(氮化镓芯片龙头)、睿能科技、宏微科技、固高科技(驱动方案集成)等,当前单个 GaN 驱动板市场价约 2000 元以上,随着量产规模扩大有望进一步降价。
04 新型减速器:摆线针轮成重负载场景新选择
减速器作为动力传递核心部件,承担提升传动精度与负载能力的关键作用,分为刚性(RV、摆线、行星减速器)与柔性(谐波减速器)两类。当前人形机器人主流采用谐波与行星减速器,而摆线针轮减速器凭借综合性能优势,正成为腰髋等重负载部位的新趋势。
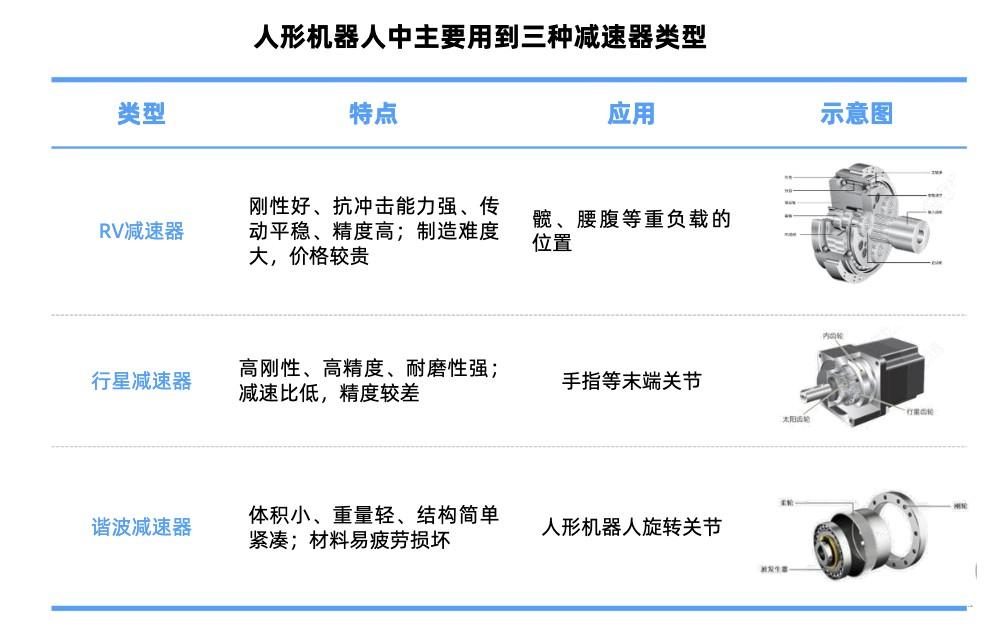
主流技术路径对比
谐波减速器:传动比大、体积小,是当前首选方案,但柔性传动易受瞬时冲击影响寿命;行星减速器:体积紧凑、寿命长,作为谐波减速器的补充方案;RV 减速器:精度高、疲劳强度高,适用于高可靠性场景;摆线针轮减速器:兼具大扭矩、抗冲击、高精度特性,通过内齿圈与摆线轮啮合传动(利用齿数差与偏心运动提升减速比),有效解决谐波减速器抗冲击短板,适配重负载关节。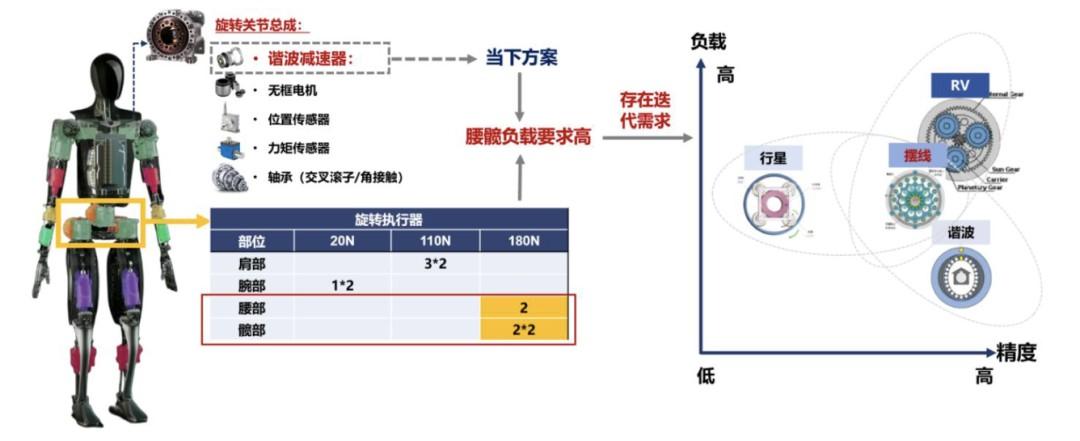 资料来源:Tesla Ai DAY
资料来源:Tesla Ai DAY
国内厂商布局
谐波减速器:绿的谐波(柔轮制造专利领先)、中大力德、同川科技、昊志机电等具备成熟技术;金帝股份 “精密冲压替代锻造” 工艺突破柔轮制造瓶颈,已通过部分客户疲劳寿命验证(测试期超三个月),尚未形成规模化收入;摆线减速器:中大力德、豪能股份、双环传动(子公司环动科技)、科达利(推出四款摆线减速器型号)、禾川科技(Hu-MCS 系列轻量化执行器)等加速布局;Agility Robotics 已实现摆线减速器规模化应用。
05 人形机器人轻量化:结构与材料双轮驱动
轻量化是提升机器人续航能力与运动灵活性的核心举措,主流厂商持续推进减重迭代:优必选 Walker C 身高增加 33cm 的同时减重 20kg,天工 Ultra 整机重量 55kg(较前代降低 5kg),特斯拉 Optimus 从 Gen 1 的 73kg 降至 Gen 2 的 63kg。结构件与骨骼占机器人总重量的 20-50%,轻量化主要通过三大路径实现:
结构轻量化(低成本易落地)
通过优化结构拓扑设计、一体化集成等方式减重,无需更换材料:
特斯拉:采用汽车级供应链技术,如一体化压铸机身、AI 算法优化运动控制,降低非必要结构重量;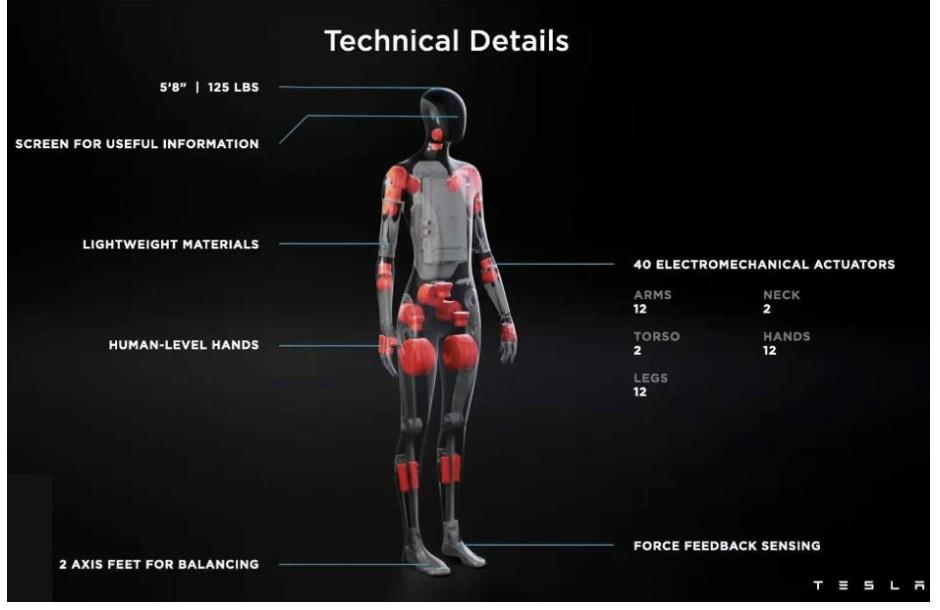 国内厂商:宇树科技一体化关节设计减少冗余部件;智元机器人与上纬新材合作,碳纤维复合材料躯体结构减重 30%(经实测验证);长盛轴承自润滑关节轴承、江苏雷利空心杯电机及伺服系统已实现小批量供货。
国内厂商:宇树科技一体化关节设计减少冗余部件;智元机器人与上纬新材合作,碳纤维复合材料躯体结构减重 30%(经实测验证);长盛轴承自润滑关节轴承、江苏雷利空心杯电机及伺服系统已实现小批量供货。
材料轻量化(高强度轻质材料替代)
核心采用 PEEK、碳纤维复合材料、镁铝合金等替代传统金属,在保障强度的同时降低能耗:
PEEK 材料:中研股份(国内产能第一、全球第四,牵头制定国家标准)、沃特股份(全流程自主掌控)、新瀚新材(与小鹏机器人合作开发关节件)等加速产业化;镁铝合金:星源卓镁、宝武镁业(压铸龙头)、旭升集团(轻量化关节件)等布局,新型镁铝合金比强度较传统钢材提升 200%。








