人形机器人产业趋势展望

一、人形机器人应用领域展望以及空间测算
应用展望:始于工业,终局是家用
场景复杂度锚定算法泛化能力梯度,按算法泛化需求从弱到强排序为:工业制造<商用服务<极端作业<家用服务。工业制造是高度结构化场景仅需机器人完成高精度重复动作,现有技术可直接迁移,成为首个落地“练兵场”;商用服务属半结构化环境,对算法实时性要求提升;极端作业为非结构化高风险场景,需算法具备强鲁棒性与容错性;家用服务是完全非结构化场景,需应对家具布局、人员活动等变量,实现端水、收纳等全场景自适应,算法泛化需求达顶峰。当前人形机器人正以工业场景为起点,逐步完成技术迭代,最终向家庭服务终局渗透。

市场规模:2040 年中国人形产业规模有望接近 3 万亿元
预期 2025 年至 2030 年人形机器人将主要应用于工业场景,提供较为简单的重复性服务; 随着数据的积累以及算法的优化,预期 2031-2035 年人形机器人有望布局商业服务场景,提供人性化的商场导购、展览讲解等服务; 2035 年及之后,人形机器人或将进入家庭生活场景,提供灵活、多元的家庭服务,满足用户日常家庭生活需要。
商业化:2027 年有望在部分场景具备商业化价值
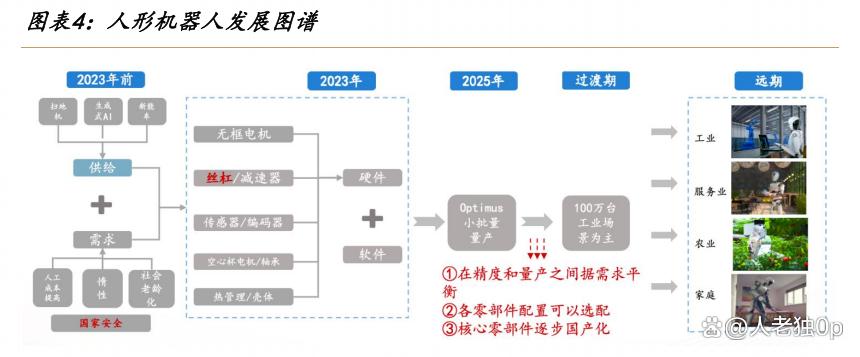
在以特斯拉为首的科技巨头持续发力投入以及人工智能技术不断进步的共同推动下,人形机器人产品和成本迭代速度显著加快,成为未来最确定的产业方向之一。从产品端看,24 年特斯拉人形围绕关节、灵巧手方案、算法训练等快速迭代,运动和认知能力大幅提升。从成本端看,随着丝杠、灵巧手、传感器等产业链迭代加速,大规模量产线的加速研发和投入使用,生产成本开始走向大幅度下降的通道。人形机器人会先从高人工成本、较低任务复杂度的领域开始迭代。
二、人形机器人发展现状
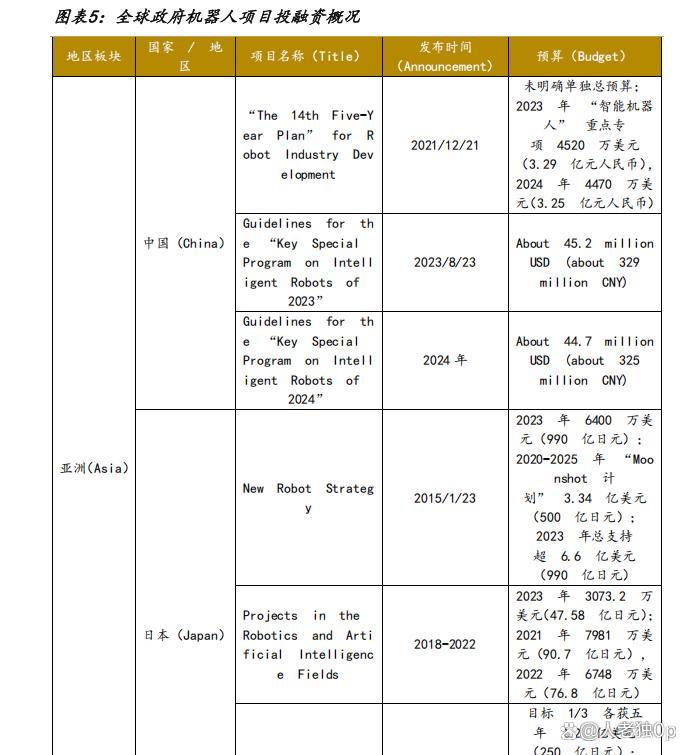
资金:投融资活跃,全球政府持续投入
据 IT 桔子统计,2025 年前三季度,国内机器人行业新增一级市场融资事件达到了 610 笔,较去年同期的 294 笔实现了同比翻倍增长。同时,根据 IFR 统计,全球政府持续针对机器人项目投入,单项目金额大多近亿美元。
技术:硬件趋于收敛,大脑是激活大规模产业化的钥匙
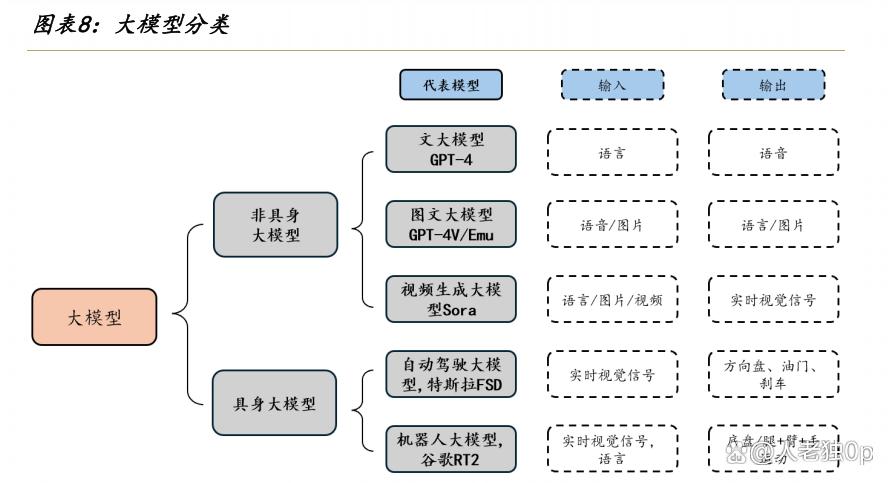
目前限制人形机器人大规模量产的重要因素是大脑进化。机器人逻辑架构由“大脑”+“小脑”+肢体组成,目前人形机器人“肢体”硬件方案趋于收敛,硬件发展整体走在软件之前。目前人形机器人“大脑”技术以大模型为核心,为人形机器人提供任务级交互、环境感知、任务规划和决策控制能力。伴随着 Ai 大模型的迭代,机器人大脑实现产业实现跨越式发展,智能化程度有望提升。
商业化:2025 年集中在研发、数采,2026 年导览、工业有望激活
2025 年,人形机器人主要应用于高校科研和数采。25H1 人形机器人中标项目金额约 3.3 亿元,其中应用于教育科研领域约占 76%。同时智元、帕西尼等本体厂商批量建设人形机器人数据采集与训练中心,扩充具身智能训练数据集,对人形机器人开展场景化训练。
2026 年,人形机器人商业化应用将进一步落地,工业、导览等场景应用有望被激活。当前,小米、小鹏、广汽已明确提出 2026 年人形机器人量产计划,并预计优先将人形机器人应用于自身的智能化工厂。奇瑞提出千台量产计划,预计将人形机器人应用于 4S 店导览。
三、人形机器人产业链发展展望
机器人技术组成逻辑架构
机器人逻辑架构:由“大脑”+“小脑”+肢体组成。人形机器人大致分为三大部分:人形本体、高动态性能的控制算法(小脑)、具有泛化性的具身智能及非常接近人的通用人工智能(大脑)。从底层算法模型来看,机器人的软件可以分为“大脑”与“小脑”,对机器人大小脑的划分不是完全按照人类大小脑工作的机理,而是在一个物理世界去应对不同层次的问题的一种策略。“大脑”负责感知外界并模拟人类思维决策过程,“小脑”则模仿生物进行复杂的运动控制,即运动控制。
算法:“大脑”成熟有迹可循,新技术、新架构快速迭代
大模型是现阶段“大脑”的最佳解决方案。伴随着 AI 大模型的发展,机器人大脑实现产业实现跨越式发展,智能化程度有望提升。目前人形机器人“大脑”技术以大模型为核心,为人形机器人提供任务级交互、环境感知、任务规划和决策控制能力。
硬件:散热、轻量化、寿命是后续迭代重点
电机:谐波磁场电机等有望成为新的解决方案
谐波磁场电机是基于新结构和新原理工作的磁场调制电机。其励磁和电枢单元的极对数不等,需新增调制单元进行磁场极对数转换,这种特殊的电磁现象称为“磁场调制效应”。在该效应下,可在相同材料选型和散热条件下大幅提升电机转矩密度,具有广阔应用前景。
减速器:技术壁垒较高、可根据场景选定减速器类型
目前谐波减速器、行星减速器以及摆线针轮等新型减速器共存。特斯拉人形机器人主流路线是谐波减速器方案,由于承载力及传动效率需求提升,研发新型减速器或者行星减速器具备必要性。国产人形机器人大都采用行星减速器为主,谐波减速器为辅。
传感器:视觉、力觉、触觉为主,亟待培育国产龙头
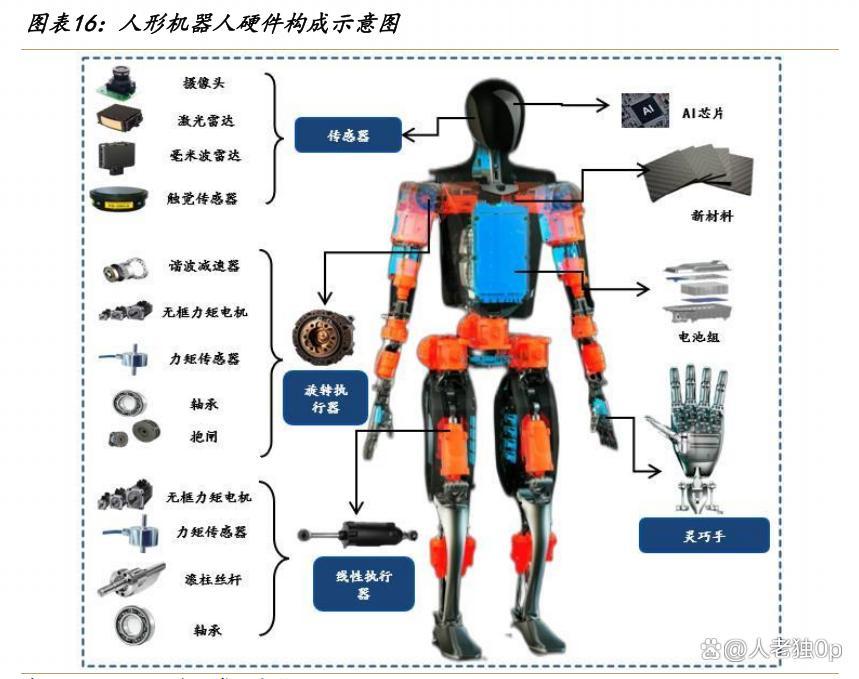
为了赋予机器人像人一样感知、学习和与环境动态交互的能力,根据其功能和应用场景,配备了多种类型的传感器。包括视觉传感器(如摄像头、激光雷达、毫米波雷达、红外传感器等)、听觉传感器(如麦克风)、嗅觉传感器(如气味传感器)、触觉传感器(包括力传感器)、编码器、IMU 等,以实现感知和分析外部环境并进行自身状态反应,实现复杂的交互和操作任务。
视觉:主流方案为 3D 视觉,有望实现国产替代
视觉方案主要分为 2D 视觉和 3D 视觉:(1)2D 视觉:通过 2D 相机分析灰度或彩色图像中的像素灰度特征获取目标中的有用信息,识别纹理形状。容易受到光照影响,且无法实现三维精准测量。(2)3D 视觉:精度更高、信息量更大(三维图像)、集成度更高,适用于更加复杂、精密的识别、检测需求。机器人的视觉感知属于高度集成的模组方案,对于体积、成本、精准度都有较高要求,因此 3D视觉高度集成、体积小、精度高的优势更适合机器人的场景。
力觉:机器人精确、灵活操作的核心
从人形机器人的工作原理来看,我们判断未来人形机器人的手腕、脚踝环节需六维力矩传感器、其他关节可以适用关节扭矩传感器。
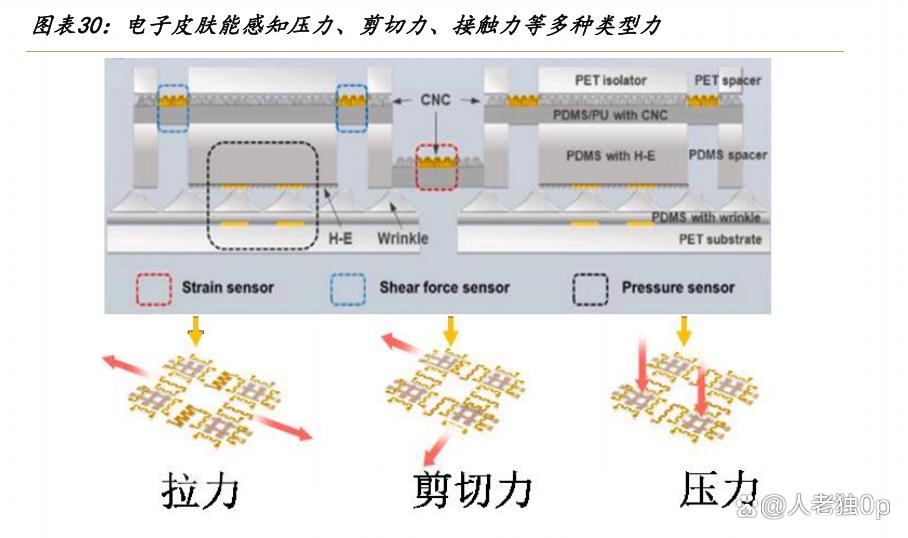
触觉:视觉+触觉为目前技术前沿、应用潜力大
电子皮肤是是新型的仿生柔性触觉传感系统,通过柔性传感器进行信号感知转换。从表面的接触方向来看,电子皮肤能够感知压力、剪切力、接触力等多个类型的力,能够助力机器人在手部实现更加精细的操作。电子皮肤主要分为基底层、导电层、传感层。