机器人足球赛夺冠秘籍大揭秘:虚拟球场练眼力 跷跷板上找平衡……

8月中旬在北京落幕的首届世界人形机器人运动会,被国际媒体誉为 “机器人的奥林匹克”。 在各项机器人为主角的竞技中,机器人足球赛,凭借其自主控制和展露出的拟人球技,吸引了众多粉丝。这些萌萌的机器人足球运动员日常是怎么训练的?目前,它们又在苦练哪些内功?
发球、带球、身体对抗、射门。
八月的北京奥林匹克公园速滑馆,一场精彩的人形机器人足球竞技刚刚落幕。机器人足球运动会,有点儿类人的味儿了。

总台央视记者 张春玲:这里就是位于北京奥林匹克公园速滑馆旁边的一个人形机器人的训练场地,比赛结束之后,机器人足球冠军的得主“火神队”还在里面进行训练,我们去看一看。

赵明国,是“火神队”的总教练,换个更专业的身份,他是清华大学自动化系机器人控制实验室研究员。

清华大学自动化系机器人控制实验室研究员 赵明国:比完赛之后我们发现机器人带球这件事可以做很大的改进,能够让机器人在接近球的时候尽快出脚。
记者:所以机器人要想踢好足球,它要最起码具备几个好的素质。

清华大学自动化系机器人控制实验室研究员 赵明国:一定是眼睛好,能看得远看得准,另外一个是移动得比较快。而且能够接触到球并马上采取行动,甚至在接触到球之前就已经知道后面要做什么,能把任务规划好,这样是一个和人类踢足球比较接近的一种方式。现在这个机器人还有一定的差距,我们就在找这个差距是什么,把它逐渐在完善。

难度一:眼力好

比赛规则要求,机器人足球运动员的双眼要接近人的视角。因此我们人类看不到的角度和范围,机器人大概率也没法直接看到。

所以比赛中,我们看到机器人在场上做的一个最多的动作就是找球。球场上机器人看到的空间环境、机器人自己和周围的队友都在不断变化,为了让机器人能去掉环境干扰,专注踢球,团队为机器人还原了一个虚拟足球场,利用机器人在真实视角和环境下采集来的数据和场景,不断训练机器人自主找球。
难度二:抗冲撞

机器人经常为了追球而发生“人挤人”的踩踏事件。你绊我一脚,我推搡你一下,虽然不是故意的,但却在所难免。因此机器人需要大练平衡力,怎么练?
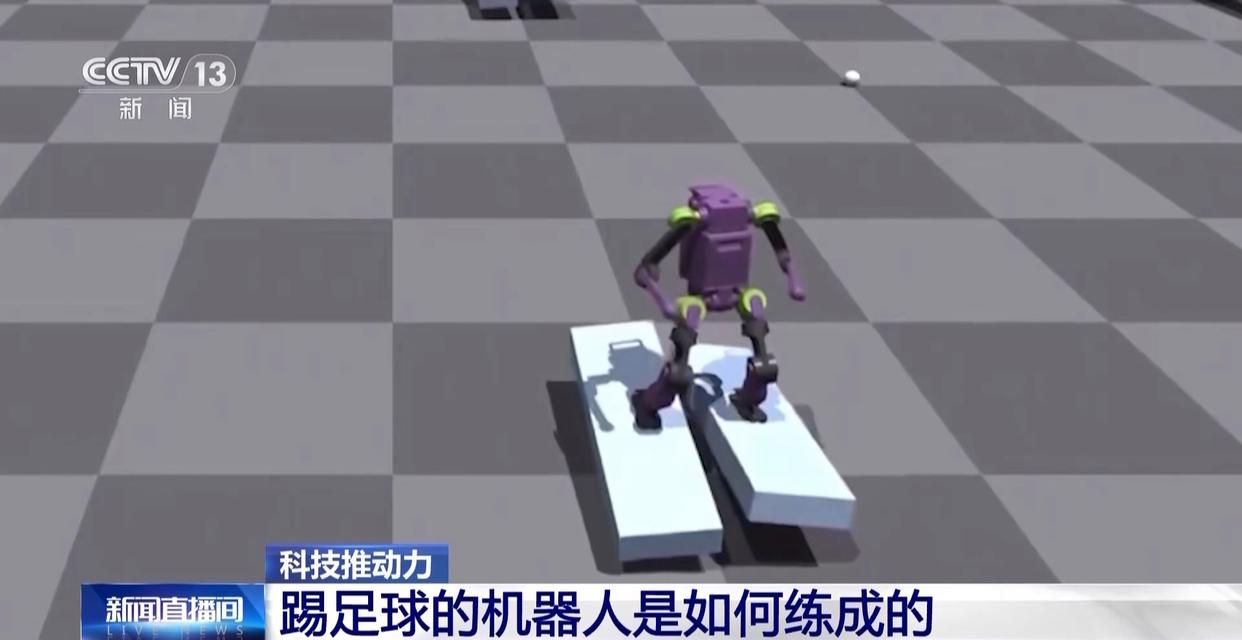
您看虚拟世界中的足球机器人,平时训练的时候,脚底都踩了两块板子,这就好像踩在跷跷板上训练,这种环境扰动下,都能稳稳站住,现场真实场景大概率也不会失衡。

除此之外,机器人通过这种强化学习,今年还进化出了自主起身的能力,这就为机器人脱离人类保育员,做了充足的技能储备。
难度三:有力道

和别的队伍不同,“火神队”机器人不满足于带球进攻,能够大力踢球,是它们夺冠的另一秘籍。在踢球姿态上,团队也对机器人进行了训练,让它们尽可能用脚弓来踢球,足弓更长,与球的接触面更大,也能更好地控制球的方向,在姿态上尽可能接近真人运动员。
机器人为何要踢足球?
看了这么多技巧训练,我们也体会到了训练一个机器人足球运动员的不容易。实际上,从1997年开始,就有机器人世界杯了,它的最终目标是要在2050年组建一支11人的机器人足球队,能够击败人类的世界杯冠军。不知道您是不是也有疑问,机器人为啥要练习踢足球呢?让我们一起来听听机器人“教练组”的解答。
清华大学自动化系机器人控制实验室研究员 赵明国:踢足球是一个整体流程,你要跑通,并不在于某项技术特别高,基本是你的感知能力、运动能力和整体的运动决策能力这三件事情放在一起来考核。就像比如说你学英语要听说读写都会了,你才能做一些基本的工作。踢足球是给了一个场景,锻炼机器人的感知、决策、运动甚至包括交互的一些能力,这些能力都具备了之后,它一定能完成一些任务。

训练机器人的感知、运动、决策这种综合能力,就是机器人真正走入真实世界需要具备的基本功。而足球场为机器人训练提供了一个比较理想的环境,在这里,有固定的环境光线、有清晰的白色边界线、场地、球门等结构化场景,又有随时变化的足球和队友等相对复杂的变化环境。机器人踢好足球,是为了迈向更广泛的真实世界,实现更大范围内的通用性。

清华大学自动化系机器人控制实验室研究员 赵明国:具身智能里的很多理论和方法可以在这上面去测试。对踢足球这个场景来讲,两个机器人能不能传球,我觉得这个挑战是目前最大的,现在大家看到的传球是机器人无意识的,就是碰巧了它在跑位。

如果能实现说我在这边带着球,像梅西一样知道另一个队员跑到什么地方能把球传出去,形成这种真正的传球,就很有意义了。这里面的很多技术就可以转化到我们其他的场景需要,比如在工厂里的机器人或者家庭服务机器人,需要的一些基本要素。
“类脑智能” 让机器人更像人
一个小小的足球场,它的边界也是机器人从具体场景迈向通用的边界。而在让机器人更智能的技术发展过程中,除了我们现在看到的这些技术方案,科研人员还在不断探索更多的可能,比如“类脑智能”,顾名思义,就是要让机器人更像人。
机器人踢足球虽然已经给我们带来了很多惊喜,但赛场上依然有不少意外。这些场面在令人爆笑的同时,也引发着一些思考,机器人笨笨蠢蠢的原因是什么?

如果你仔细观察人类踢球,就会发现,在球场上除了“盯球”,人类球员往往需要同时调用多种感官,比如靠听觉判断其他球员的位置,靠触觉感知球的运动状态,再结合视觉做出快速决策。而机器人却缺少这样的协同机制。
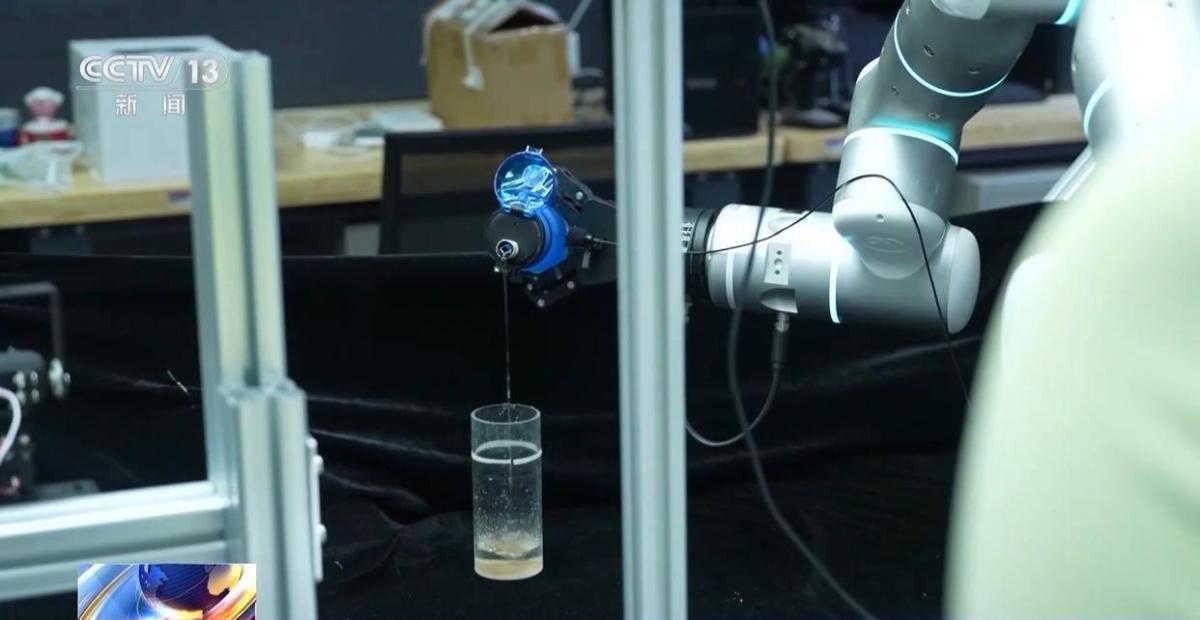
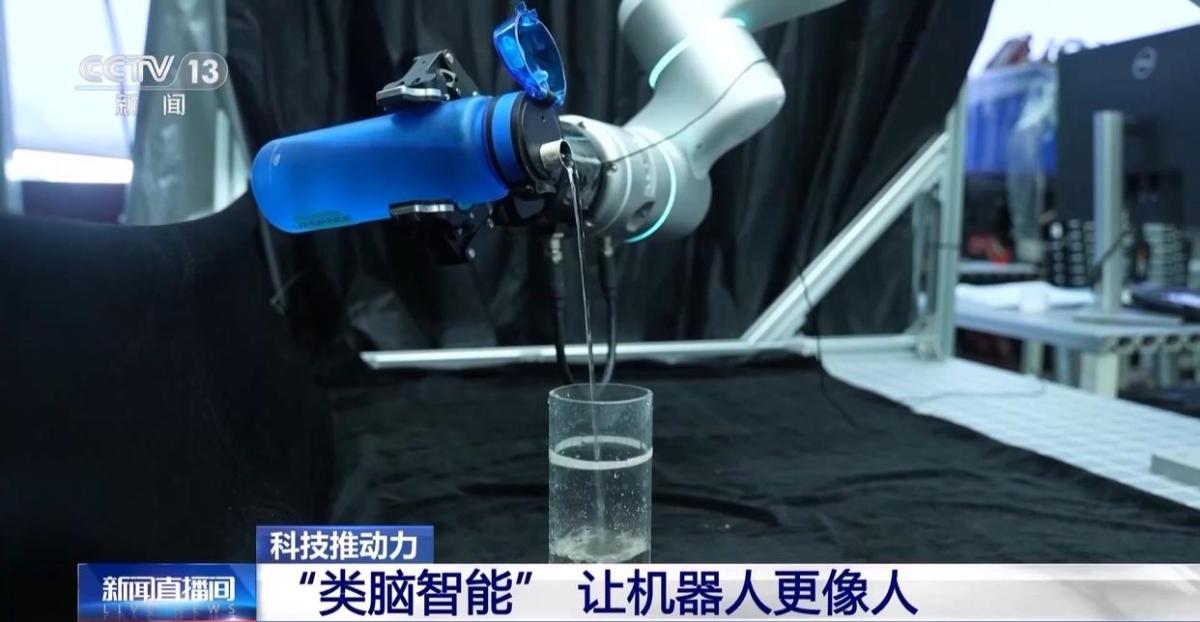
突破这个瓶颈,就要依靠“类脑”的研究,而这也是赵国明团队正在推进的科研项目。在清华大学的实验室里,研究人员正通过一个“倒水实验”来模拟这种挑战。
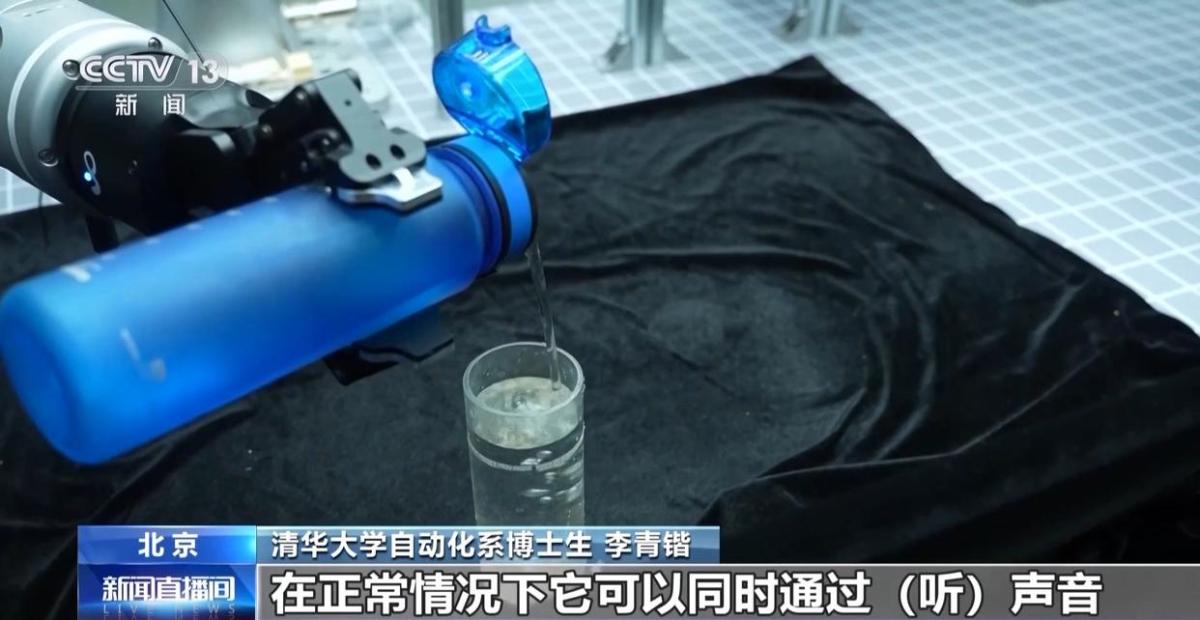
清华大学自动化系博士生 李青锴:我们运用了多感知,它在正常情况下可以同时通过听声音和看画面来完成倒水,通过我们的模型设计,让它能够比如在声音受干扰的情况下,如果看画面有效,它可以通过看画面来完成倒水,或者如果看画面受到了干扰,这个时候它可以完全靠听声音来倒水。
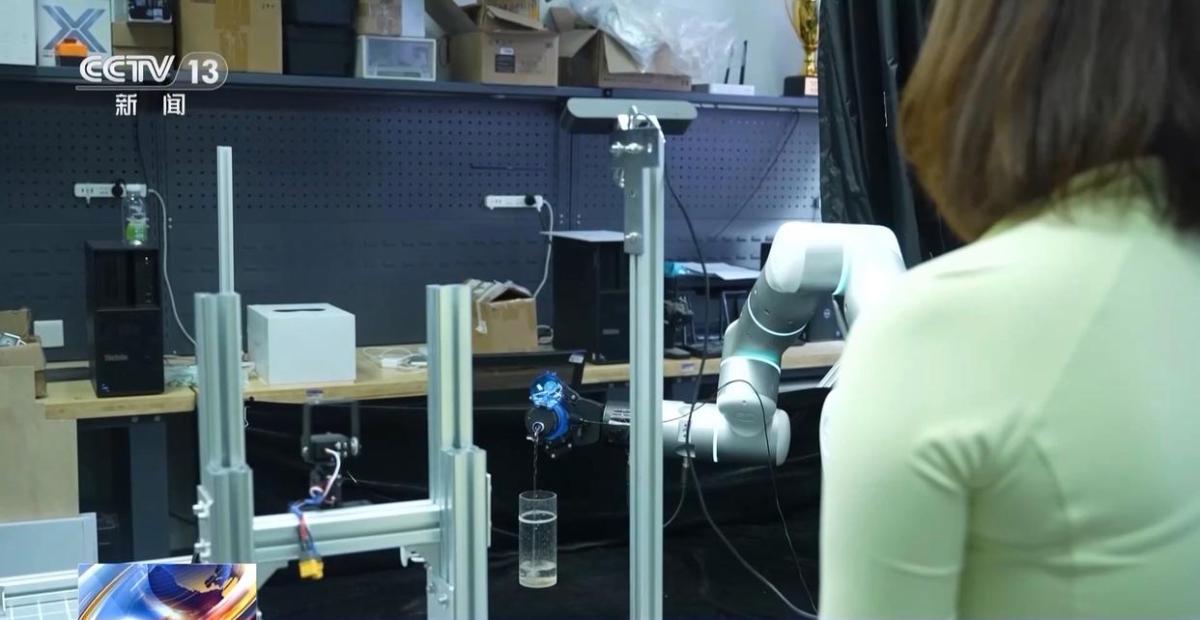
在倒水过程中,机器人的行为可以靠视觉、听觉和力控等多维度的感知共同完成,而为了让机器人能够更加集中注意力,我将机器人的视觉进行了遮挡,我们发现,它依然可以顺利地依靠听觉信息完成任务。
这和我们生活中一边倒水,一边视线可以看向别的地方很像。在同等时间范围内,机器人能依靠不同的感知能力完成任务的切换,就叫“注意力转移”机制。
而这个机器臂实时自主决策的后台,也为我们展示了机器人倒水过程中注意力切换的过程。
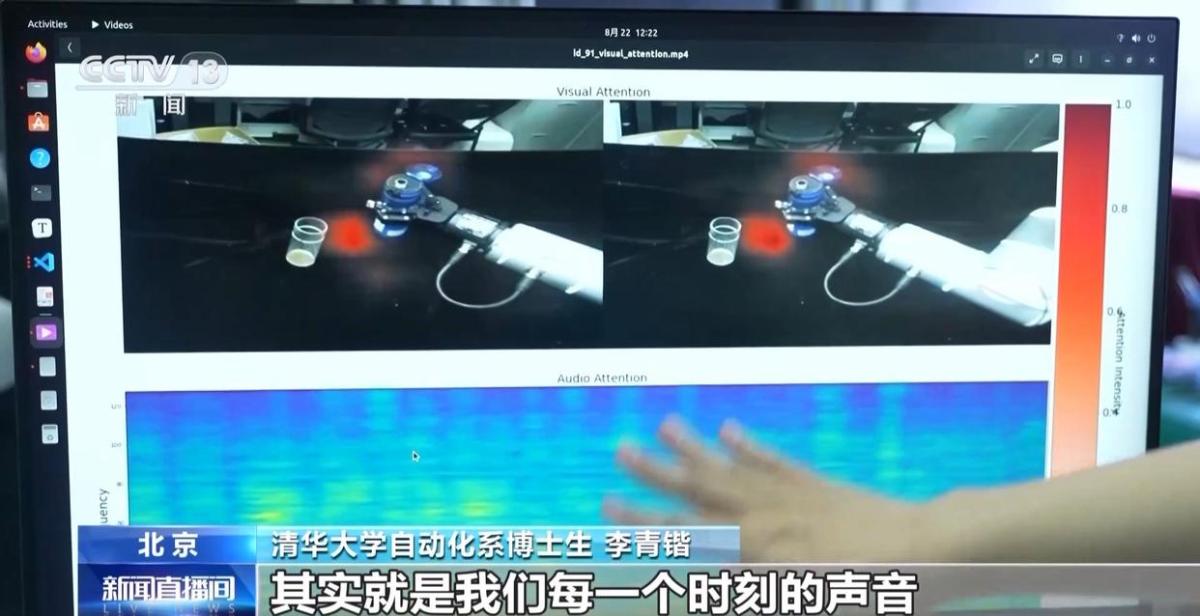
清华大学自动化系博士生 李青锴:这两个画面就是机器人摄像头的左眼和右眼的画面。下面的波形图是声音,可以看到,红色的含义是模型或者说我们的算法,它对画面或者声音的注意力情况。可以看到在一开始的时候,更多的红色区域是在画面上的,说明这个时候更多是靠画面来完成任务,遮挡视觉之后一下子画面上就没有红色块了,而在声音这块的红色一下就变得非常的明显,说明它把注意力放到声音这块儿了。
来源:央视新闻





